


Fixed-time prescribed performance formation control of heterogeneous UAV-USV systems under actuator faults
 0
0 Abstract
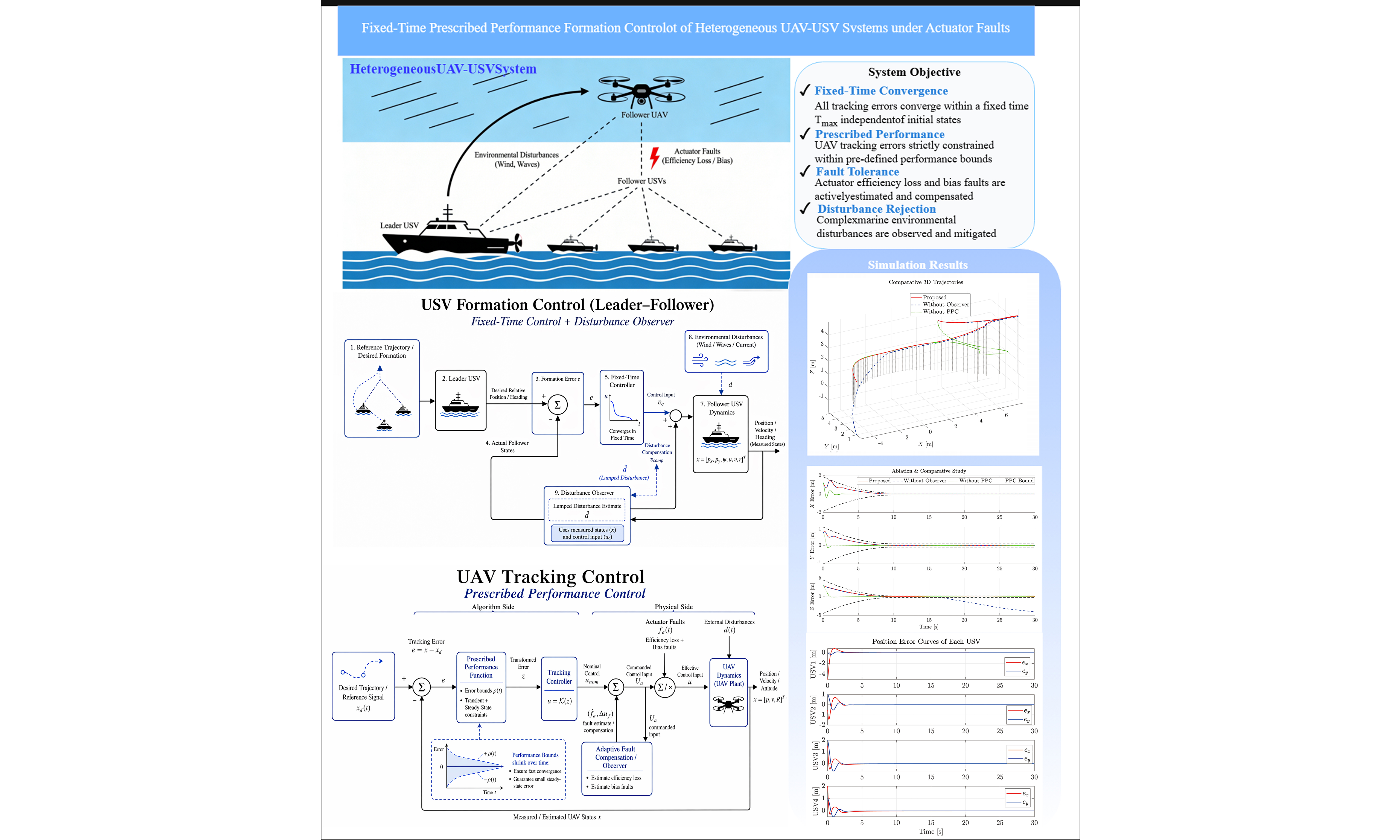
This paper addresses the robust cooperative control problem of heterogeneous unmanned aerial vehicles (UAVs) and unmanned surface vehicles (USVs) under actuator faults and complex environmental disturbances. A heterogeneous fixed-time prescribed performance formation control framework is proposed to ensure precise coordination among the vehicles. Specifically, a disturbance observer-based fixed-time control law is developed for USV formation control, employing a leader-follower topology. Simultaneously, a fixed-time prescribed performance control strategy based on error transformation is designed for the UAVs to ensure convergence within specified performance boundaries. To enhance system resilience, a disturbance observer is designed for the USV formation system to handle complex marine environmental disturbances. Meanwhile, for the UAV subsystem, an adaptive fault-tolerant mechanism is integrated to estimate and compensate for loss of actuator efficiency and bias faults. Lyapunov stability analysis theoretically proves that all tracking errors in the closed-loop system converge to a small neighborhood of the origin within a fixed time, independent of the initial system states. The simulation results validate the effectiveness of the proposed formation methods.
Keywords
1. INTRODUCTION
Unmanned systems have become crucial components in military and civilian applications, as well as in rescue and detection operations, owing to the rapid development of automation technologies [1,2]. Their primary advantages lie in reducing human intervention, improving system autonomy, mitigating operational risks, and ensuring personnel safety. With the constant growth of automation technologies for unmanned surface vehicles (USVs), the role of USVs in marine equipment ecosystems and civilian/military applications has become increasingly significant [3,4].
Although individual unmanned systems have advantages in particular missions, their operational capability and effectiveness are inherently restricted [5,6]. Therefore, researchers are increasingly focusing on the cooperative formation control of multiple unmanned systems to enhance multi-task collaboration capabilities. The most significant issue in USV formation control is the acquisition and processing of information. Collaborative formation is usually based on state information [via Global Navigation Satellite System (GNSS)/Inertial Navigation System (INS)] and neighbor information (via radar/SLAM), both of which are often limited by environmental adaptability, line-of-sight, and signal coverage [7].
In contrast, unmanned aerial vehicles (UAVs) possess distinct operational advantages, such as high maneuverability, rapid response capability, and most importantly, a wide and unobstructed top-down view [8,9]. When UAVs are integrated with USVs, the resulting heterogeneous UAV-USV system combines the complementary strengths of both domains: the UAV serves as an aerial monitor providing a global view, while the USV formation functions as a mobile base offering endurance and payload support [10]. Such cross-domain cooperation can significantly improve the autonomy and operational effectiveness of maritime missions [11,12].
Nevertheless, despite extensive research on cooperative control, achieving reliable formation control under harsh marine conditions remains challenging. In general, available control methods can be categorized into three groups according to their design objectives and operational characteristics:
First, regarding convergence performance, traditional cooperative controls largely rely on asymptotic stability or finite-time stability. For example, studies in [13,14] addressed consensus problems and derived sufficient conditions for exponential or asymptotic convergence. Although these methods are theoretically sound, the settling time is heavily dependent on the initial states of the system [15–17]. In emergency maritime rescue scenarios, where initial position errors are often random and large, such dependence can lead to unacceptable long convergence times [18]. Although finite-time control provides improved performance, the upper limit of the settling time still depends on the initial conditions. In contrast, fixed-time stability ensures that the settling time is bounded by a constant independent of the initial states. Recent advancements in this field have been achieved in the case of general multi-agent systems (MASs). As an illustration, earlier work has already examined fixed-time group consensus for MASs with nonlinear dynamics and uncertainties [19], and formulated fixed-time group tracking control methods to address unknown underlying nonlinear dynamics [20]. Although these sophisticated methods offer a solid theoretical basis for handling nonlinearities and uncertainties, their application to heterogeneous cross-domain marine systems (e.g., UAV-USV), particularly in the presence of simultaneous actuator failures and stringent performance requirements, remains insufficiently explored [21].
Second, regarding constraint handling and safety, optimization-based methods such as model predictive control (MPC) and control barrier functions (CBFs) are widely used. Studies in [22,23] have shown the usefulness of MPC and CBF in constraint handling and collision avoidance. However, these methods are computationally intensive and require accurate global models, which can be impractical when considering resource-limited embedded systems. Prescribed performance control (PPC) provides a computationally efficient alternative by converting constrained tracking errors into unconstrained forms. Although a recent review [24] examined the concept of PPC in UAV-USV systems, further investigation is still required to guarantee strictly limited transient performance in heterogeneous systems under fault conditions.
Third, regarding robustness against faults and disturbances, marine systems are subject to various sources of uncertainty. Traditional robust control approaches generally treat actuator failures and environmental forces as bounded lumped disturbances [25,26]. Such passive approaches are conservative because the controller cannot actively identify particular actuator faults (e.g., efficiency loss [27] or bias) and thus cannot provide specific compensation, which can cause formation degradation [28,29]. Although some disturbance observers [30] and resilient control mechanisms [31–33] have been proposed, effective methods specifically designed to address complex hydrodynamic coupling and heterogeneous faults in UAV-USV systems remain insufficiently investigated [34–38].
Motivated by the above observations, this paper addresses the problem of heterogeneous UAV-USV formation control subject to strict time constraints, actuator faults, and environmental disturbances. A hierarchical leader-follower architecture [39] is adopted, where the USV formation acts as a mobile reference, while the UAV tracks the center of the formation. The objective is to design a unified control framework that guarantees: (1) Formation establishment within a user-defined fixed time; (2) Strict adherence to safety performance bounds; and (3) Active resilience against mechanical failures and environmental interference.
The main contributions of this paper are summarized as follows:
1. A Heterogeneous Fixed-Time Control Framework: An inclusive cooperative control framework is designed to integrate leader-follower fixed-time convergence control for the USV subsystem with fixed-time PPC for the UAV subsystem. The proposed framework guarantees accurate USV formation geometry and effective UAV tracking of the formation center within a predictable time, irrespective of the initial errors.
2. Active Fault Tolerance with Disturbance Decoupling: By integrating adaptive estimation with disturbance observers, the proposed method actively distinguishes and compensates for actuator efficiency loss/bias faults and lumped environmental disturbances. This strategy significantly reduces the conservatism compared to passive robust controls.
3. Guaranteed Transient Performance: By introducing prescribed performance functions (PPFs) and error transformation techniques, the transient overshoot and steady-state tracking errors of the UAV are strictly constrained within predefined boundaries, ensuring safe cross-domain tracking.
4. Robust USV Formation: A fixed-time disturbance observer is specifically employed for the USV subsystem to counteract harsh environmental disturbances, ensuring the stability of the mobile base.
2. METHODS
Before presenting the dynamic models, the control objectives and constraints are explicitly defined to clarify the research motivation. Consider a heterogeneous system composed of
The primary control objective is to design distributed control laws
1. Objective 1: Fixed-Time Formation Convergence. The position tracking error of the USV formation must converge to a small neighborhood of the origin within a user-defined fixed time
where
2. Objective 2: Prescribed Performance Constraint (Safety). For the UAV, to ensure flight safety and transient performance, the tracking error
where
3. Objective 3: Active Fault Tolerance. The heterogeneous system must maintain stability and performance despite the presence of time-varying actuator faults. The fault model is defined as:
where
Assumption 1. The desired trajectory of the leader USV and the formation geometry are smooth and bounded, and their time derivatives exist and remain bounded.
2.1. USV model
Consider a heterogeneous system consisting of one leader USV, multiple follower USVs, and one follower UAV. The coordinate systems of the heterogeneous UAV-USV cooperative system are illustrated in Figure 1. Let the position vector of the
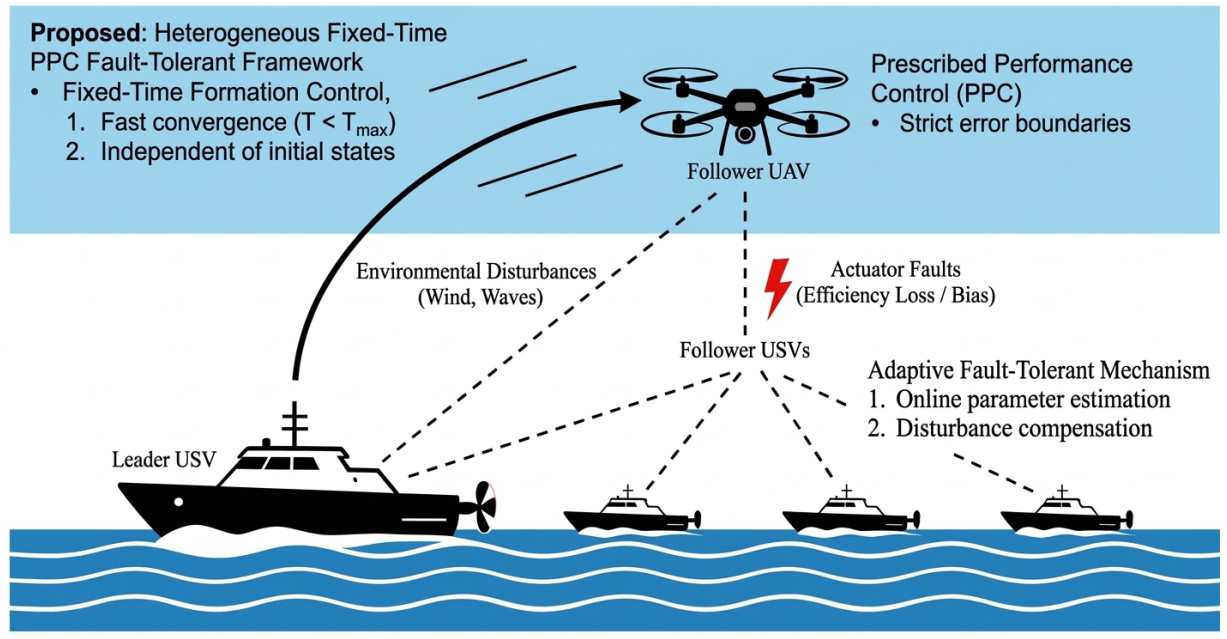
Figure 1. Overall framework of the heterogeneous UAV-USV formation system under complex marine environments, illustrating the leader-follower topology, environmental disturbances (wind, waves), and actuator faults affecting the agents. UAV: Unmanned aerial vehicle; USV: unmanned surface vehicle.
The rotation matrix is expressed as follows:
The dynamics equation is given by:
Remark 1 (Justification of the asymmetric fault-tolerant strategy for heterogeneous systems):
In this study, the fault-tolerant strategy is designed asymmetrically, which is entirely consistent with the heterogeneous nature of the UAV-USV cooperative system. In such a heterogeneous framework, the agents exhibit fundamentally different dynamic sensitivities and vulnerabilities, necessitating tailored resilient mechanisms. On one hand, UAVs are highly dynamic and rely entirely on continuous active thrust to counteract gravity; even minor degradation in actuator efficiency can lead to immediate altitude divergence and catastrophic failure (as demonstrated in the simulations). Therefore, the UAV subsystem strictly requires an active fault-tolerant strategy, where actuator faults (efficiency loss and bias) are explicitly modeled and adaptively compensated. On the other hand, USVs are supported by natural buoyancy, operate at low speeds, and possess inherently large inertia. Minor actuator degradation in USVs manifests as sluggishness rather than an immediate loss of stability. Therefore, based on practical engineering considerations and to avoid unnecessary over-parameterization of the control law, a robust passive fault-tolerant strategy is adopted for the USVs. Any deviation or degradation in the USV actuators is mathematically incorporated into the bounded lumped disturbance term
where
2.2. UAV Model
Let the position of the UAV in the inertial coordinate system be
where
This study adopts a hierarchical control architecture. The outer-loop position controller outputs the virtual control law
Remark 2: The simplification in Equation (10) is based on the principle of time-scale separation. It is assumed that the bandwidth of the inner-loop attitude controller is significantly higher than that of the outer-loop position controller. According to Singular Perturbation Theory, when the inner-loop dynamics settle sufficiently rapidly (i.e.,
Assuming that the inner-loop attitude controller possesses sufficiently high bandwidth to rapidly track the desired attitude (i.e.,
where
The UAV actuator fault model is described as follows:
where
Although the UAV thrust is generated through the coupling of the rotor system, a reduction in rotor speed generally results in a simultaneous decrease in control effectiveness along all three axes due to attitude coupling. This physical phenomenon suggests the existence of correlations among the efficiency factors of the three channels. However, the actuator bias term
3. CONTROLLER DESIGN
3.1. Fixed-time controller design for USVs
To tackle the collaborative control problem of a heterogeneous UAV-USV system subject to external disturbances and actuator faults, a fixed-time adaptive distributed control strategy is proposed. For USV formation control, a leader-follower architecture is employed, consisting of one leader USV and three follower USVs. The trajectory of the leader USVs is assumed to be known or externally provided, and the follower USVs are tasked with maintaining a fixed relative geometric configuration with respect to the leader.
Definition 1[40]: Consider a system described by
where
To simplify the controller design, the position control (outer loop) and attitude control (inner loop) are decoupled. The backstepping method is adopted for the position loop design, assuming that the attitude control loop can rapidly and stably track the desired yaw angle. For control design, the planar position of the
where
For consistency, the position tracking error vector is also written as:
Taking the time derivative of
To ensure fixed-time convergence of the position error, a virtual control law
where
The auxiliary control term
where
Considering planar motion, a reduced 2-degree-of-freedom (2-DOF) dynamic model is used. The actual control input
where
where
The dynamics of the velocity loop disturbance observer is given by:
where
This observer structure guarantees that the estimation errors for lumped disturbances (including those caused by unmodeled dynamics and wind/wave forces) converge to the origin in a fixed time, independent of initial estimation errors.
3.2. Prescribed performance controller design for UAV
To achieve the desired tracking performance, the overall control architecture proposed in this paper is shown in Figure 2. It mainly consists of a trajectory tracking controller, a fault-tolerant mechanism, and a disturbance observer. PPC is an advanced control strategy designed to precisely regulate both transient and steady-state tracking performance. Its fundamental idea involves designing time-varying performance functions to establish strict boundaries for the error convergence process, thereby ensuring that overshoot, convergence rate, and steady-state precision satisfy predefined requirements.
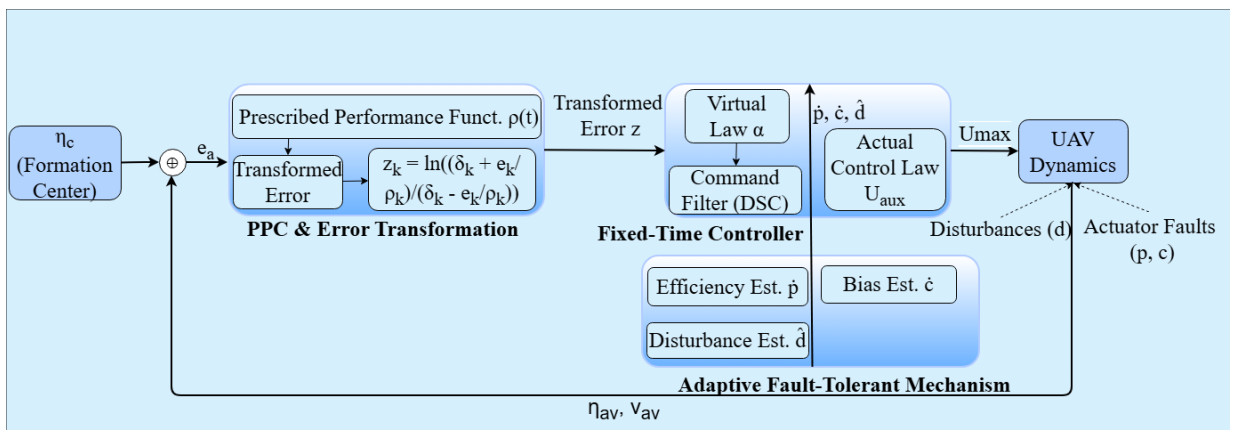
Figure 2. Block diagram of the proposed fixed-time prescribed performance fault-tolerant control strategy for the UAV subsystem. The architecture integrates error transformation, command filtering, and adaptive compensation to handle safety constraints and actuator faults. UAV: Unmanned aerial vehicle; PPC: prescribed performance control; DSC: dynamic surface control.
In the proposed framework, the UAV tracks the geometric center of the USV formation as its target. Let the UAV position in the inertial frame be
where
Accordingly, the error dynamics are given by:
where
To achieve fixed-time convergence of tracking errors, a performance function
where
Direct controller design based on the constrained error
The evolution path
The evolution path is designed as:
The introduction of
Here,
Define the deviation between the actual error and the ideal evolution path as:
where
The logarithmic function transforms the constrained error
Here,
Taking the time derivative of
where the intermediate term
This transformed dynamics
Based on the dynamics of the transformed error
First, the dynamics of the transformed error system can be expressed in vector form as:
where
Virtual Control Law Design: The virtual control law
where
Command Filter Design: Since the virtual control law
where
Actual Control Law Design: Define the actual velocity tracking error as:
Based on the equation of UAV dynamics
where
3.3. Adaptive update laws design
To estimate the unknown parameters
First, define the parameter estimation errors:
Consider the following Lyapunov candidate terms for parameter adaptation:
where
Taking the time derivative of
where
4. STABILITY ANALYSIS
4.1. Fixed-time stability proof for USV formation
Construct the following composite Lyapunov candidate function:
where
Taking the time derivative of the Lyapunov function
Step 1: Position Loop Dynamics. Substituting the kinematic equation and the virtual control definition, the derivative of the position error is derived as:
Recalling that
where
Step 2: Velocity Loop Dynamics. Substituting the USV dynamics and the actual control law
Thus, the second term in
From the above equations, it can be observed that the coupling term
Step 3: Disturbance Estimation Error. Assuming that the external disturbance varies slowly relative to the observer dynamics, i.e.,
These observer dynamics are designed to stabilize the estimation error subsystem within a fixed time.
Substituting all terms back into
Remark 3: Since the residual term
where
Here,
4.2. Stability proof for the UAV subsystem
Construct the following composite Lyapunov candidate function:
where the components are defined as:
4.2.1. Time derivative and convergence analysis
Lemma 2 (Boundedness of Transformation Terms): Assume that the performance function
and its time derivative
Taking the time derivative of
Substituting the formation error derivative
Using the velocity definition
Substituting the designed virtual control law
Considering the UAV dynamics
The parameters are decomposed into their true values and estimates (e.g.,
Substituting the actual control law
Using the filter dynamics
Applying Young's inequality,
For
Combining all terms yields:
Substituting the adaptive update laws with
Using the inequality
Finally, for the cross term
Since
where
Remark 4 (Convergence Time Analysis): The Lyapunov analysis in Equation (75) proves that the transformed error
5. SIMULATION AND COMPARATIVE ANALYSIS
To verify the effectiveness and robustness of the proposed heterogeneous fixed-time prescribed performance formation control strategy, numerical simulations are conducted. To rigorously validate the necessity of each module (PPC and Adaptive Observer) in the UAV subsystem, we conducted a comparative study involving three distinct cases.
● Case 1 (Proposed method): The complete algorithm, which incorporates fixed-time PPC, evolution path, and an adaptive fault-tolerant mechanism.
● Case 2 (Without Observer): An ablation study in which fault compensation is disabled (i.e.,
● Case 3 (Without PPC): A comparative study using a standard fixed-time sliding mode controller without prescribed performance constraints.
5.1. Simulation setup
The simulations are performed using MATLAB with a fixed time step of
5.1.1. Trajectory and physical parameters
The USV formation is tasked with tracking a virtual leader moving along a circular trajectory defined by
5.1.2. Topology and initial states
The formation topology is defined by the relative position offsets
● USVs:
● UAV: Initial position
5.1.3. Control and fault parameters
To validate fixed-time convergence and fault tolerance, the control parameters of the Proposed method are selected as:
● Fixed-Time Parameters: Power parameter
● USV Gains: Position loop gains
● UAV PPC Parameters: The performance function parameters are set with initial boundaries
● UAV Controller Gains: Virtual control gain
Furthermore, to test the adaptive compensation mechanism under different fault scenarios (Case 1 and Case 2), actuator faults are introduced into the UAV with an efficiency factor
5.2. Comparative analysis of UAV trajectory
Figure 3 presents a comparison of the 3D trajectories of the heterogeneous system. The Proposed method (red solid line) follows the spiral ascending track easily and sustains the formation structure perfectly. In contrast, the Without PPC case (green dotted line) exhibits pronounced oscillations in the initial stage due to the absence of transient constraints. Most importantly, in the Without Observer case (blue dashed line), the UAV suffers from a severe altitude drop (Z-axis). This is because the 10% thrust loss (
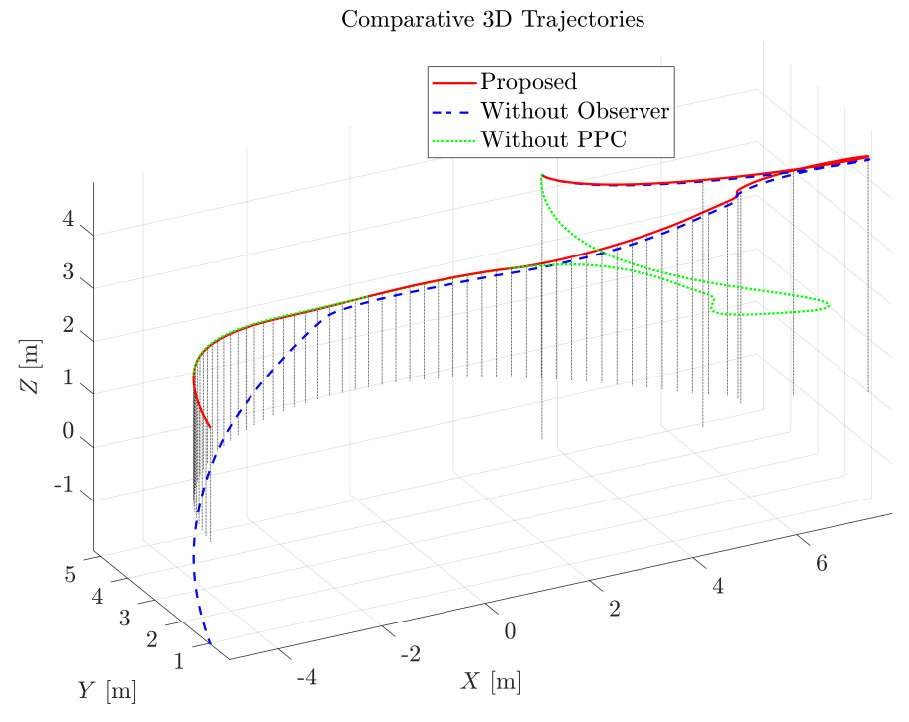
Figure 3. Comparative 3D trajectories. The Proposed method (red) tracks the reference smoothly, while the Without Observer case (blue) suffers from altitude deviation. PPC: Prescribed performance control.
5.3. Comparative error analysis of UAV
Figure 4 provides a more detailed understanding of control quality. Transient Smoothness: While the Without PPC case (green) stays within the boundaries in this setup, it exhibits pronounced jitter and non-smooth "sharp turns" in the X and Y channels during the first 2 s. In contrast, the Proposed method (red) follows the Ideal Evolution Path (grey dots) with superior smoothness. Boundary Enforcement: The PPC boundaries (black dashed lines) strictly envelope the red trajectory. Critical Failure Analysis: In the Z-error subplot, the Without Observer case (blue) diverges significantly after
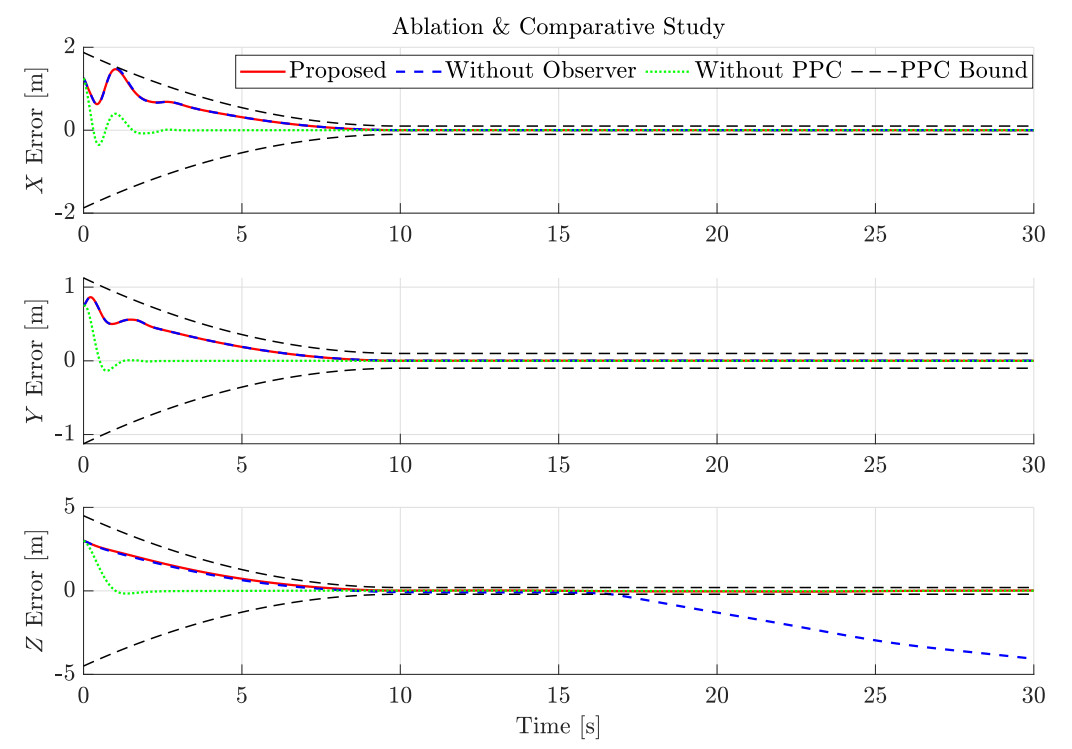
Figure 4. Comparative evolution of UAV tracking errors. Black dashed lines indicate PPC boundaries. UAV: Unmanned aerial vehicle; PPC: prescribed performance control.
5.4. UAV parameter identification
Figure 5 illustrates the performance of the observer. For the Proposed case, the efficiency estimate
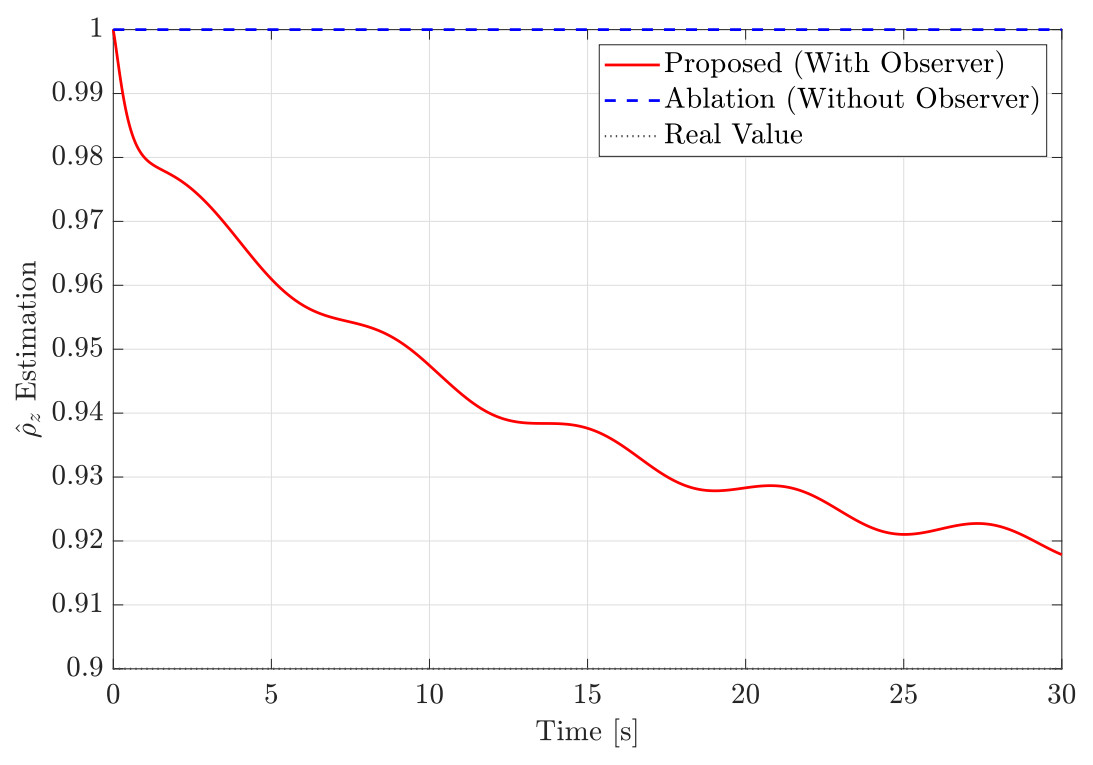
Figure 5. Adaptive estimation of UAV actuator efficiency
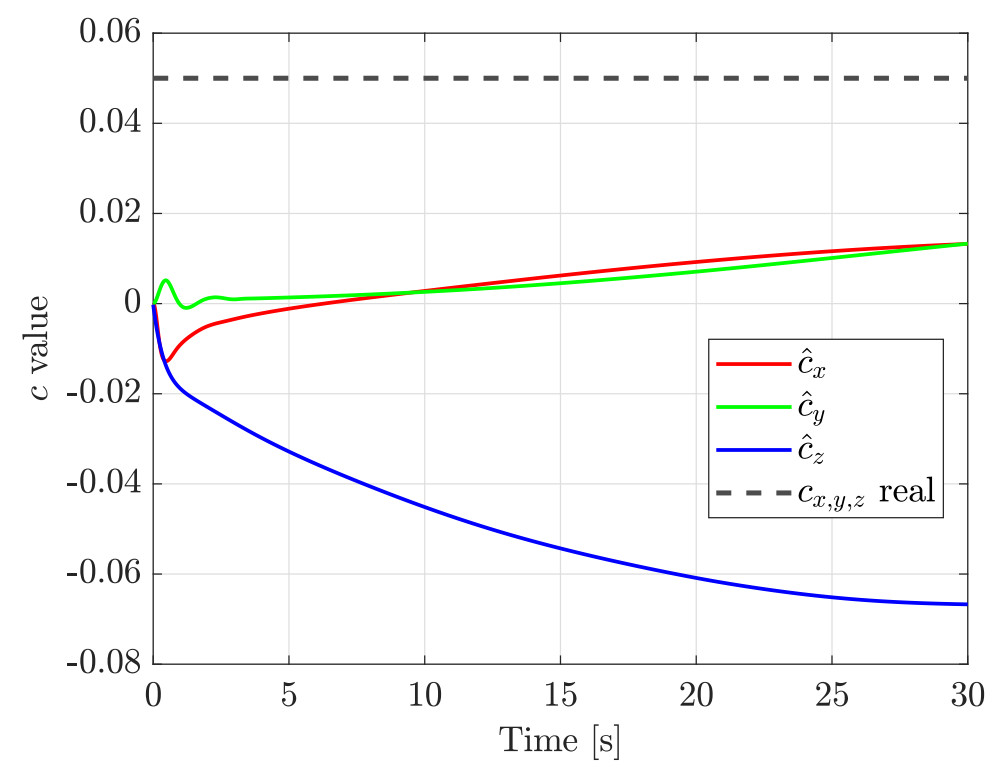
Figure 6. Estimation of UAV actuator bias faults (
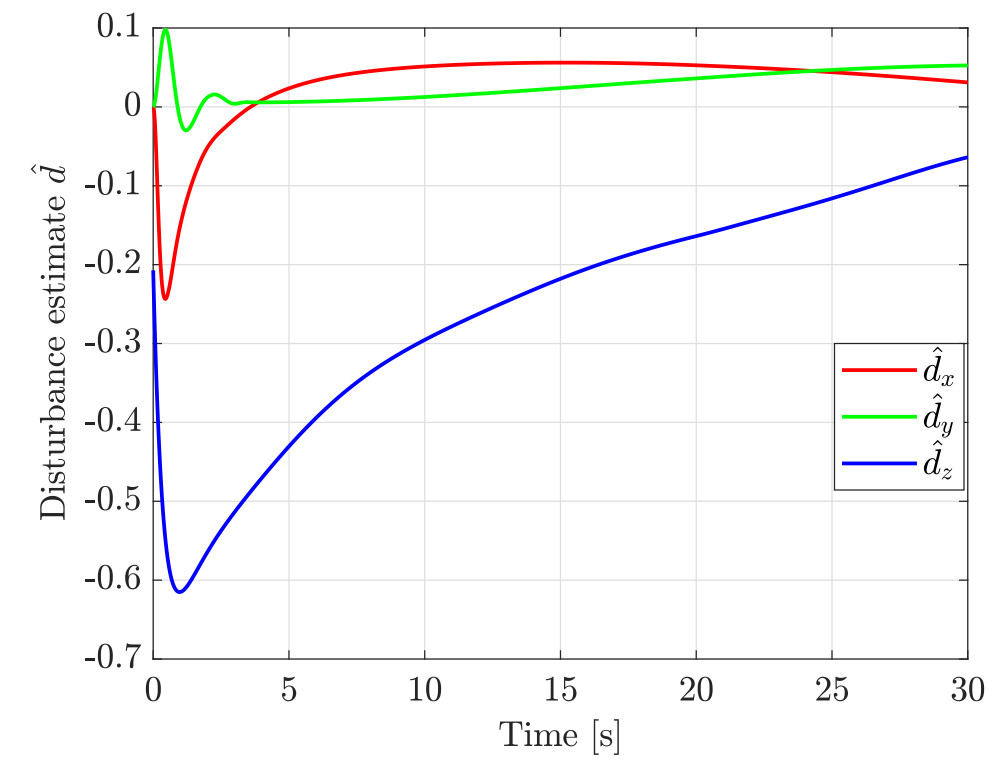
Figure 7. Estimation of lumped disturbances (
Remark 5 (Comprehensive analysis on parameter estimation and control objectives):
As shown in Figure 6, the estimated bias
First, regarding parameter identifiability, the bias fault
Second, regarding the reasonableness of the framework, such non-convergence to true values is a standard and acceptable characteristic of robust adaptive control. The robust
Finally, regarding the control objective, the primary goal of the proposed fixed-time PPC is trajectory tracking and ensuring that errors remain strictly within safety boundaries, rather than performing precise system parameter identification. The Lyapunov-based stability analysis in Section 4 theoretically proves that tracking stability and error constraints are guaranteed as long as the overall uncertainty is compensated and the estimation errors remain bounded, completely independent of whether individual parameters converge to their exact physical true values.
5.5. Performance of USV formation (fixed-time stability)
Figure 8 illustrates the position tracking error curves of the four USVs during the formation process. The initial position errors of the followers (about 5 m) quickly converge to zero within an extremely short time interval (
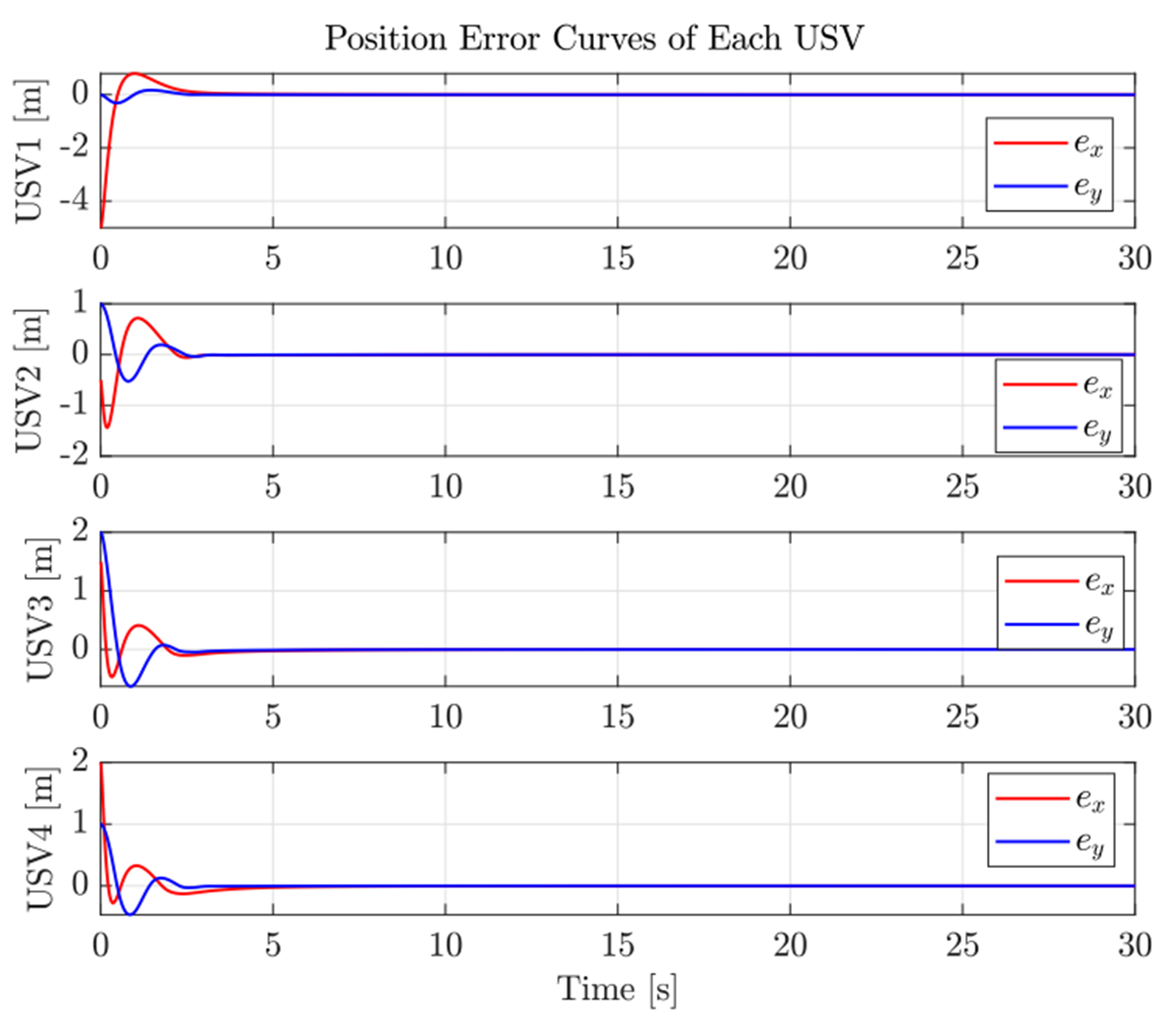
Figure 8. Convergence curves of position tracking errors for each autonomous vehicle. USV: Unmanned surface vehicle.
Figures 9 and 10 display the estimation results of the disturbance observers for the USV position loop and velocity loop, respectively. For the position loop disturbance estimates [Figure 9], the observed values converge to the steady state within 5 s, effectively capturing environmental disturbances such as currents.
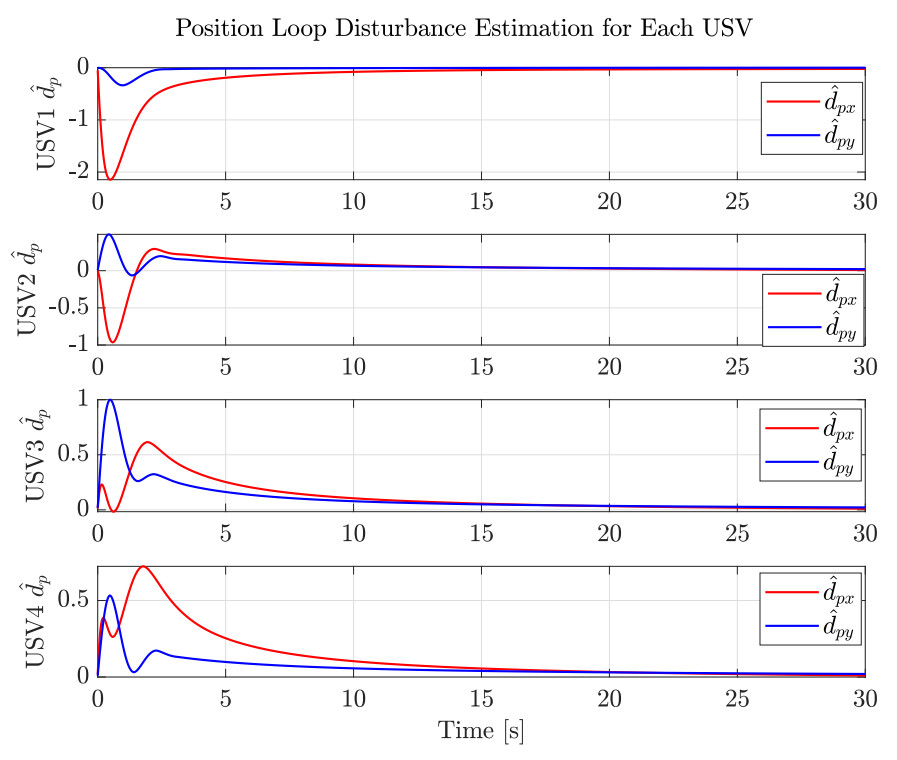
Figure 9. USV position loop disturbance estimation results. USV: Unmanned surface vehicle.
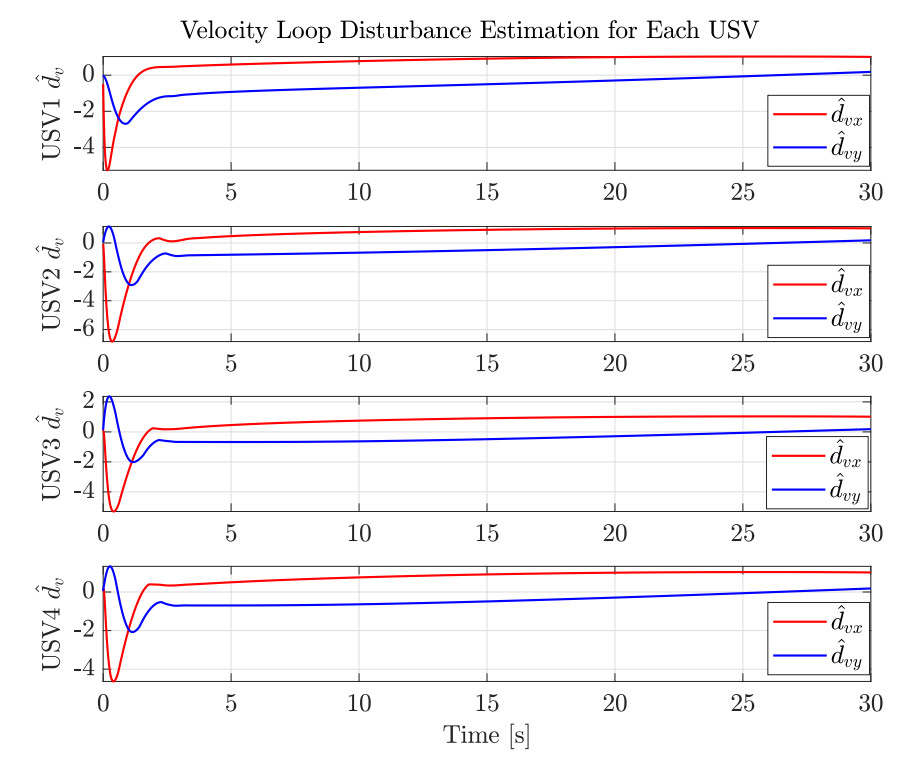
Figure 10. USV velocity loop disturbance estimation results. USV: Unmanned surface vehicle.
For the velocity loop disturbances [Figure 10], different USVs (e.g., USV1 vs. USV2) experience different linear velocities due to their positions in the inner and outer lanes of the formation during turning maneuvers, leading to varying hydrodynamic drag forces. The estimated disturbance curves accurately reflect this physical phenomenon, converging to distinct constant values (ranging between -1 and +1). This proves that the observer can precisely capture model uncertainties under different dynamic states.
It is worth noting that, to clearly verify the baseline convergence and steady-state tracking performance of the proposed disturbance observers, the environmental disturbances in this simulation case are primarily modeled as steady-state components (e.g., constant ocean currents and mean wind forces). As shown in the results, the proposed observers rapidly and accurately converge to these constant principal values, demonstrating excellent steady-state estimation performance. Validating the system's robustness against higher-frequency, violently fluctuating wave dynamics remains an important aspect of future real-world experiments.
6. CONCLUSIONS
This study examines the issues related to robust cooperative control in heterogeneous UAV-USV systems and presents a novel fixed-time prescribed performance formation control structure for environments subject to actuator faults and nonlinear disturbances, based on fixed-time stability theory. In this theoretical context, a cooperative structure is developed by integrating the leader-follower topology for USV formation with prescribed performance constraints for UAV tracking. To improve control accuracy and convergence rate, a fixed-time control law based on a disturbance observer is employed to ensure that transient and steady-state errors converge within a certain time bound, irrespective of initial conditions. Furthermore, an adaptive fault-tolerant mechanism is implemented to precisely evaluate and compensate in real time for loss of actuator efficiency, bias faults, and lumped disturbances in heterogeneous agents. Simulation findings confirm the effectiveness of the suggested heterogeneous fixed-time prescribed performance formation control approach in maintaining precise formation geometry under dynamic conditions. Future work will extend the framework to address time-varying communication delays and packet losses within the proposed fixed-time stability analysis framework, with particular emphasis on experimental validation using physical UAV-USV systems in real maritime environments. In addition, simultaneous consideration of both abrupt and severe actuator failures in USVs and UAVs will be investigated in future studies.
DECLARATIONS
Authors’ contributions
Made substantial contributions to the conception and design of the study and performed data analysis and interpretation: Liang, Z.; Zhou, W.; Wang, Y.
Performed data acquisition, as well as providing administrative, technical, and material support: Wang, Y.; Yang, Y.
Availability of data and materials
All simulation parameters and mathematical models used to support the findings of this study are included within the article.
AI and AI-assisted tools statement
During the preparation of this work, the authors used AI-assisted tools, specifically ChatGPT (version GPT-4, OpenAI), for language translation, text polishing to improve readability, and visual enhancement of block diagrams (e.g., layout optimization and formatting). The conceptual content, mathematical modeling, data generation, and all scientific results are entirely the original work of the authors. After using these tools, the authors thoroughly reviewed and edited both the manuscript and figures, and take full responsibility for the final content of the publication. No AI technologies were used in the study design, mathematical modeling, or generation of data and results.
Financial support and sponsorship
This work was supported by the National Natural Science Foundation of China (Grant Nos. 62203293 and 52407123) and the Social and People's Livelihood Science and Technology Project (Grant No. MSZ2025119).
Conflicts of interest
All authors declared that there are no conflicts of interest.
Ethical approval and consent to participate
Not applicable.
Consent for publication
Not applicable.
Copyright
© The Author(s) 2026.
REFERENCES
1. Ren, H.; Liu, Q.; Zhou, Q.; Lu, R. A review of distributed cooperative control research on unmanned autonomous systems (in Chinese). J. Guangdong. Univ. Technol. 2024, 41, 1-13.
2. Xiong, Y.; Fu, M.; Li, B.; Yao, T.; Zhang, R. Multi-robot formation control based on leader-follower method (in Chinese). Mech. Electr. Eng. Technol. 2024, 53, 136-41. https://kns.cnki.net/kcms2/article/abstract?v=zE0--Q1IihSpR58jxWP-rI_Xt7XR2FFHu_0U64TvMTFY-xHgpaKYdipE-eFxbuLPGSU-Ef381kUv8Eb-Sohrv5y4Fntr8xVUXS49IIXdEAUhJXWsmxq3FSgyF7K9TbzRDnTjFc-J7R_WyHY983wtH9eT2GIu6MA-yHQIM3RsrXRywMCnN1Pw_w==&uniplatform=NZKPT&language=CHS. (accessed 2026-05-12).
3. Piracha, A. Z.; Rinner, B. Virtual leader-based safe formation-switching control for dense environments. In ICASSP 2025 - 2025 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Hyderabad, India. Apr 06-11, 2025. IEEE; 2025. p. 1-5.
4. Luo, D.; Wang, Y.; Lewis, F. L.; Song, Y. Unified output feedback based prescribed performance consensus tracking control of heterogeneous multi-agent systems. IEEE/CAA. J. Autom. Sin. 2025, 12, 1636-47.
5. Wu, Y.; Low, K. H.; Lv, C. Cooperative path planning for heterogeneous unmanned vehicles in a search-and-track mission aiming at an underwater target. IEEE. Trans. Veh. Technol. 2020, 69, 6782-7.
6. Huang, T.; Chen, Z.; Gao, W.; Xue, Z.; Liu, Y. A USV-UAV cooperative trajectory planning algorithm with hull dynamic constraints. Sensors 2023, 23, 1845.
7. Zhang, J.; Liu, X.; Wang, X.; Wang, Y.; Wang, Y. Adaptive prescribed performance tracking control for underactuated unmanned surface ships with input quantization. Intell. Robot. 2024, 4, 146-63.
8. Li, J.; Zhang, G.; Zhang, X.; Zhang, W. Integrating dynamic event-triggered and sensor-tolerant control: application to USV-UAVs cooperative formation system for maritime parallel search. IEEE. Trans. Intell. Transp. Syst. 2024, 25, 3986-98.
9. Li, J.; Zhang, G.; Wang, L.; Zhang, X. Modeling and cooperative path following control of USVs-UAVs via the event-triggered communication. In 2024 36th Chinese Control and Decision Conference (CCDC), Xi'an, China. May 25-27, 2024. IEEE; 2024. pp. 1568-72.
10. Li, X.; Cai, G.; Wu, T.; Yang, Q. A formation transformation control method for UAV swarm based on stress matrix (in Chinese). Control. Decis. 2024, 39, 2195-204.
11. Roggi, G.; Gozzini, G.; Invernizzi, D.; Lovera, M. Vision-based air-to-air autonomous landing of underactuated VTOL UAVs. IEEE/ASME. Trans. Mechatronics. 2024, 29, 2338-49.
12. He, X.; Li, Y.; Yu, Y. Prescribed-time formation control of quadrotor UAVs based on leader-follower approach (in Chinese). Control. Eng. China. 2025, 32, 1813-21.
13. Li, X.; Wen, G.; Sun, C. Leader-following consensus of open multi-unmanned aerial vehicles systems under directed topology. In 2024 SICE Festival with Annual Conference (SICE FES), Kochi City, Japan. Aug 27-30, 2024. IEEE; 2024. pp. 752-7. https://ieeexplore.ieee.org/document/10805206. (accessed 2026-05-12).
14. Sun, Y.; Peng, S. Consensus of discrete-time leader-following linear multi-agent systems under Lyapunov-function-based event-triggered mechanism. IEEE. Trans. Circuits. Syst. Ⅱ. Exp. Briefs. 2023, 70, 4409-13.
15. Song, S.; Liu, Z.; Yuan, S.; Wang, Z. Cascaded extended state observers-based fixed-time line-of-sight path following control for unmanned surface vehicles with disturbances and saturation. IEEE. Trans. Veh. Technol. 2024, 73, 7733-47.
16. Gao, H.; Xia, Y.; Liu, K.; Zhang, J.; Cui, B. Resilient neuroadaptive distributed fixed-time attitude coordination control for multiple spacecraft. IEEE. Trans. Cybern. 2024, 54, 4973-85.
17. Wang, T.; Xu, Y.; Liu, Y.; Wang, D. Fast fixed-time-synchronized sliding mode formation control for uncertain autonomous surface vehicles. In 2025 37th Chinese Control and Decision Conference (CCDC), Xiamen, China. May 16-19, 2025. IEEE; 2025. pp. 1664-9.
18. Zhang, J.; Yu, S.; Yan, Y.; Wu, D. Fixed-time output feedback sliding mode tracking control of marine surface vehicles under actuator faults with disturbance cancellation. Appl. Ocean. Res. 2020, 104, 102378.
19. Shang, Y.; Ye, Y. Fixed-time group tracking control with unknown inherent nonlinear dynamics. IEEE. Access. 2017, 5, 12833-42.
20. Shang, Y. Fixed-time group consensus for multi-agent systems with non-linear dynamics and uncertainties. IET. Control. Theory. Appl. 2018, 12, 395-404.
21. Sun, G.; Liang, B. Fixed-time observer based adaptive prescribed performance control for full state feedback system with disturbance. In 2024 IEEE 13th Data Driven Control and Learning Systems Conference (DDCLS), Kaifeng, China. May 17-19, 2024. IEEE; 2024. pp. 848-53.
22. Peng, Y.; Yan, H.; Rao, K.; Yang, P.; Lv, Y. Distributed model predictive control for unmanned aerial vehicles and vehicle platoon systems: a review. Intell. Robot. 2024, 4, 293-317.
23. Ding, J.; Zhang, H. T.; Hu, B. B.; Jiang, W.; Liu, X. Mutual-rendezvous control and feature-compatible landing optimization for heterogeneous UAV–USV fleets. IEEE. Trans. Ind. Inform. 2026, 22, 348-59.
24. Luo, Y.; Tang, F.; Wei, Q. Event-based human-in-the-loop formation-containment control for heterogeneous UAV-USV systems with dual predefined-time prescribed performance. IEEE. Trans. Veh. Technol. 2026, 75, 1990-2000.
25. Li, S.; Jia, Y.; Xiang, Z.; Zhang, J. Distributed event-triggered positive consensus protocol design for leader-following multi-agent systems. In 2025 IEEE 14th Data Driven Control and Learning Systems (DDCLS), Wuxi, China. May 09-11, 2025. IEEE; 2025. pp. 398-403.
26. Su, W.; Mu, C.; Zhu, S.; Niu, B.; Sun, C. Event-triggered leader-follower bipartite consensus control for nonlinear multi-agent systems under DoS attacks. Sci. China. Inf. Sci. 2025, 68, 132206.
27. Wu, Y.; Liang, H.; Xuan, S.; Zhang, X. Extended state observer based finite-time fault-tolerant formation control for multi-UAVs. J. Franklin. Inst. 2024, 361, 107158.
28. Zhang, H.; Ding, Y.; Yue, X. Distributed formation control of aircraft with fixed-time and prescribed performance based on leader-follower approach (in Chinese). Aeronaut. Sci. Technol. 2025, 36, 1-9.
29. Zheng, Z.; Wang, Y.; Li, C. Observer-based fixed-time leader-following consensus control for MASs subject to DoS attack. In 2023 7th International Symposium on Computer Science and Intelligent Control (ISCSIC), Nanjing, China. Oct 27-29, 2023. IEEE; 2023. pp. 236-40.
30. Trejo, J. A. V.; Ponsart, J. C.; Adam-Medina, M.; Valencia-Palomo, G.; Theilliol, D. Distributed observer-based leader-following consensus control for LPV multi-agent systems: application to multiple VTOL-UAVs formation control. In 2023 International Conference on Unmanned Aircraft Systems (ICUAS), Warsaw, Poland. Jun 06-09, 2023. IEEE; 2023. p. 1-8.
31. Yang, Y.; Shen, B.; Ge, X.; Li, S.; Han, Q. L. Dynamic event-triggered cluster consensus of multi-agent systems via PSO-GA co-design. IEEE. Trans. Autom. Sci. Eng. 2025, 22, 11505-18.
32. Yang, T.; Lu, Z.; Cui, G.; Ding, S. Funnel-based predefined-time formation control for heterogeneous vehicle platoon with asymptotic tracking. IEEE. Trans. Veh. Technol. 2025, 74, 7178-87.
33. Ballotta, L.; Talak, R. Safe distributed control of multi-robot systems with communication delays. IEEE. Trans. Veh. Technol. 2025, 74, 10137-50.
34. Wang, H.; Wang, H.; Guo, X. Distributed adaptive fault-tolerant formation control for heterogeneous USV-AUV swarms based on dynamic event triggering. J. Mar. Sci. Eng. 2025, 13, 2116.
35. Ma, Y.; Jiang, B.; Wang, J.; Gong, J. Adaptive fault-tolerant formation control for heterogeneous UAVs-UGVs systems with multiple actuator faults. IEEE. Trans. Aerosp. Electron. Syst. 2023, 59, 6705-16.
36. Yang, Z.; Li, M.; Yu, Z.; Cheng, Y.; Xu, G.; Zhang, Y. Fault detection and fault-tolerant cooperative control of multi-UAVs under actuator faults, sensor faults, and wind disturbances. Drones 2023, 7, 503.
37. Yang, Y.; Zhang, B.; Hu, M. Heterogeneous formation control of UAV-USV under actuator faults (in Chinese). Flight. Control. Detect. 2024, 7, 14-20.
38. Charitidou, M.; Dimarogonas, D. V. Virtual leader and distance based formation control with funnel constraints. IEEE. Trans. Control. Netw. Syst. 2025, 12, 1342-53.
39. Imran, I. H.; Kurtulus, D. F.; Memon, A. M.; Goli, S.; Kouser, T.; Alhems, L. M. Distributed robust formation control of heterogeneous multi-UAVs with disturbance rejection. IEEE. Access. 2024, 12, 55326-41.
Cite This Article
How to Cite
Download Citation
Export Citation File:
Type of Import
Tips on Downloading Citation
Citation Manager File Format
Type of Import
Direct Import: When the Direct Import option is selected (the default state), a dialogue box will give you the option to Save or Open the downloaded citation data. Choosing Open will either launch your citation manager or give you a choice of applications with which to use the metadata. The Save option saves the file locally for later use.
Indirect Import: When the Indirect Import option is selected, the metadata is displayed and may be copied and pasted as needed.
About This Article
Copyright

Data & Comments
Data
0













Comments
Comments must be written in English. Spam, offensive content, impersonation, and private information will not be permitted. If any comment is reported and identified as inappropriate content by OAE staff, the comment will be removed without notice. If you have any queries or need any help, please contact us at support@oaepublish.com.