


Figure2
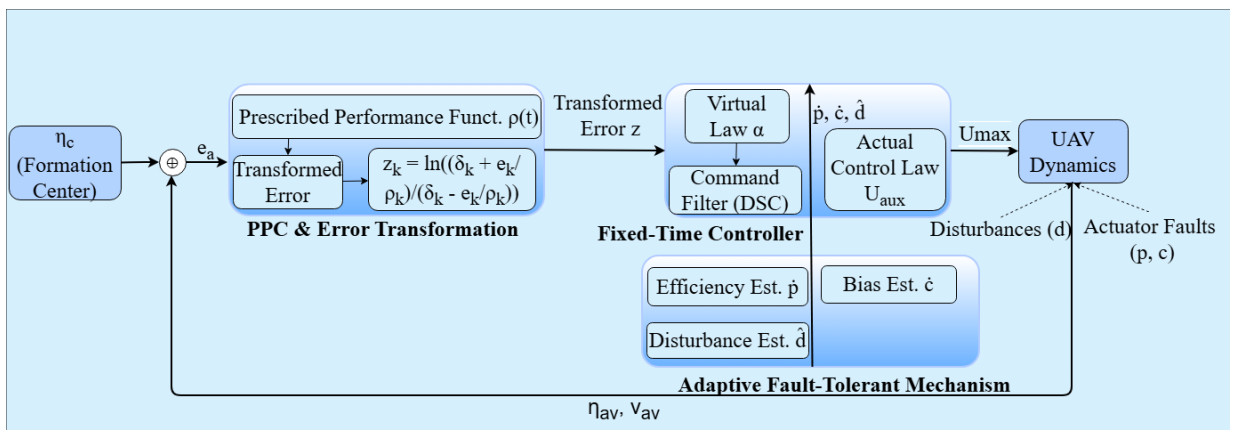
Figure 2. Block diagram of the proposed fixed-time prescribed performance fault-tolerant control strategy for the UAV subsystem. The architecture integrates error transformation, command filtering, and adaptive compensation to handle safety constraints and actuator faults. UAV: Unmanned aerial vehicle; PPC: prescribed performance control; DSC: dynamic surface control.





