



fig5
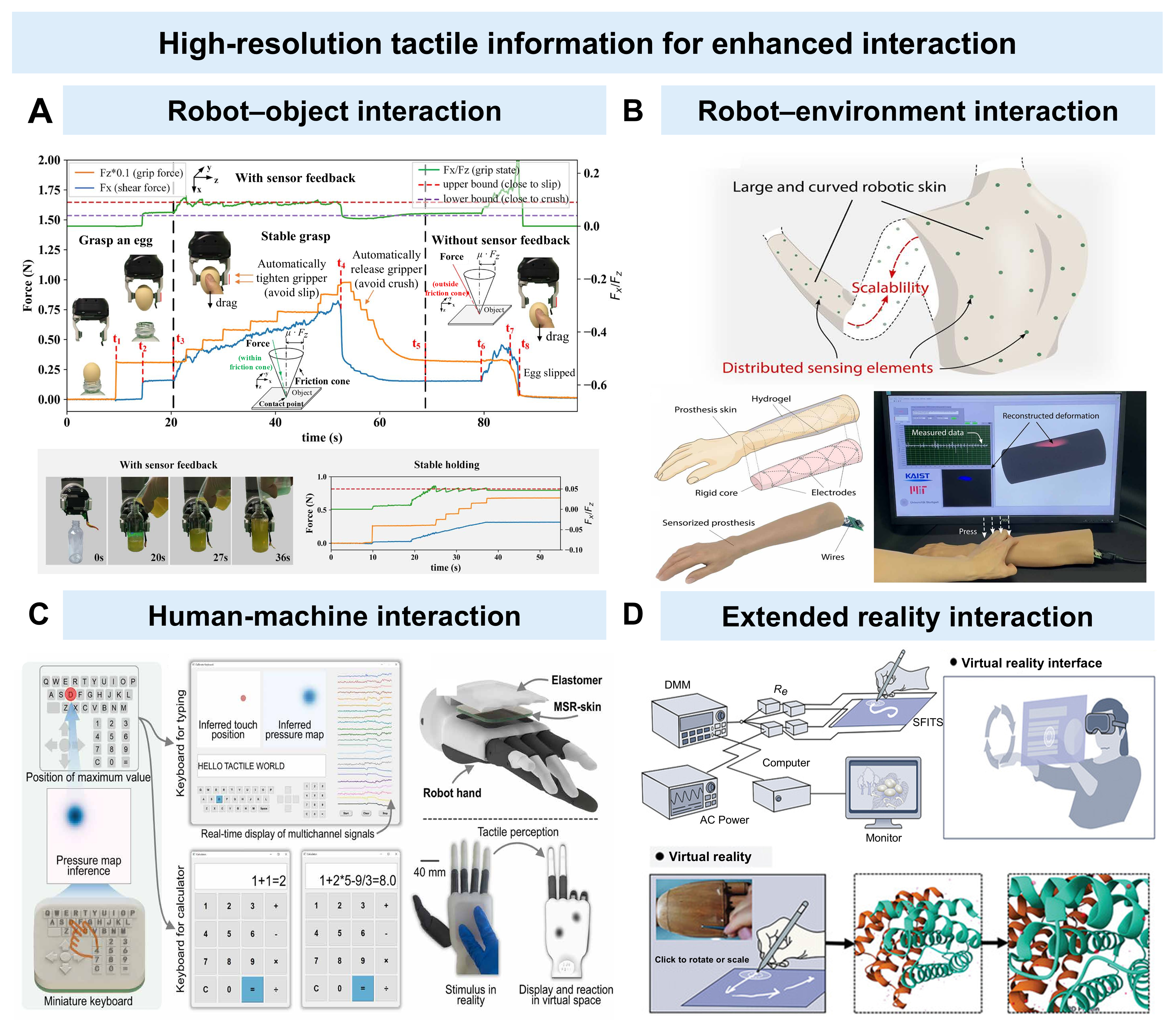
Figure 5. Applications of enhanced interaction enabled by high-resolution flexible tactile sensors. (A) Robot–object interaction involving stable grasping and adaptive holding enabled by a soft magnetic skin with SR localization and self-decoupled force sensing. Reproduced with permission from Ref.[79], Copyright © 2021 The American Association for the Advancement of Science; (B) Robot–environment interaction supported by large-area tactile perception on curved prostheses using a biomimetic hydrogel-based e-skin. Reproduced with permission from Ref.[121], Copyright © 2022 The American Association for the Advancement of Science; (C) Human-machine interaction using a SR sparse taxel array, including a miniaturized tactile keyboard and embodied tactile perception on a robot hand. Reproduced from Ref.[82] under the CC BY 4.0 license, Copyright © 2025 The American Association for the Advancement of Science; (D) XR interaction based on a SFITS that converts touch and handwriting inputs into commands for manipulating 3D virtual models. Reproduced with permission from Ref.[89], Copyright © 2025 Wiley. SR: Super-resolution; e-skin: electronic-skin; XR: extended reality; SFITS: silk fibroin ionic touch screen; MSR: multi-point super-resolution; DMM: desktop multimeter; AC: alternating current.





