



fig4
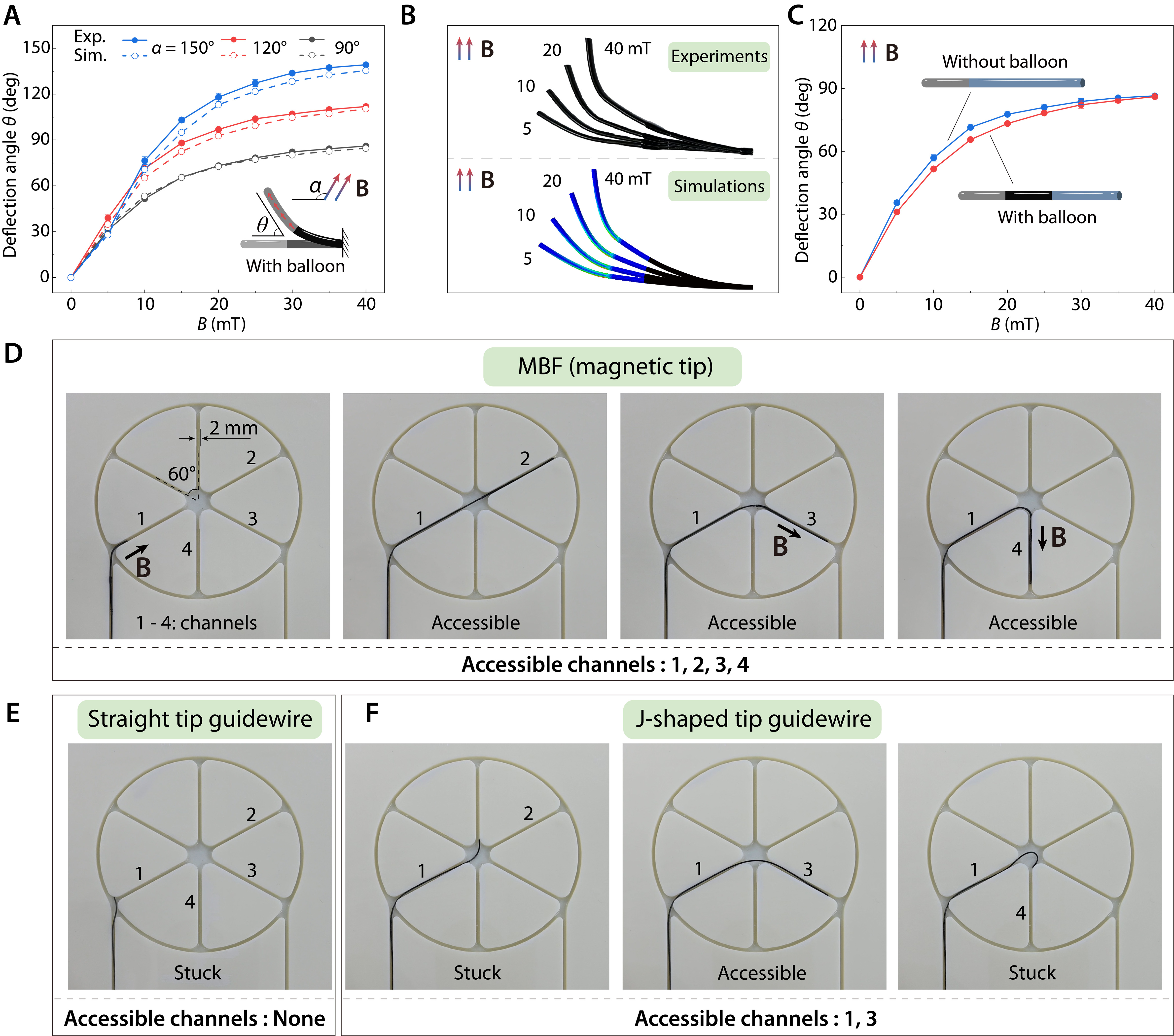
Figure 4. Magnetic deflection and navigation performance of the MBF. (A) Experimental and finite element simulation results of the deflection angle θ of the MBF with different field strength B and angle α; (B) Comparison of experiments and simulations at magnetic field angle α = 90°; (C) Comparison of the deflection angle of the MBF with and without the phase-change balloon, demonstrating the minimal impact of the balloon on navigation performance; (D) Accessibility test of the MBF in planar channels, showing successful navigation through all four channels under external magnetic fields; (E) Accessibility test of the commercial guidewire with a straight tip in planar channels, showing no accessibility to all channels; (F) Accessibility test of the commercial guidewire with J-shaped tip in planar channels, showing partial accessibility to only channels 1 and 3. For quantitative experimental data, error bars represent the standard deviation (SD), with n = 3 independent replicates. MBF: Magnetic balloon fiberbot; Exp.: experiment; Sim.: simulation.





