



fig2
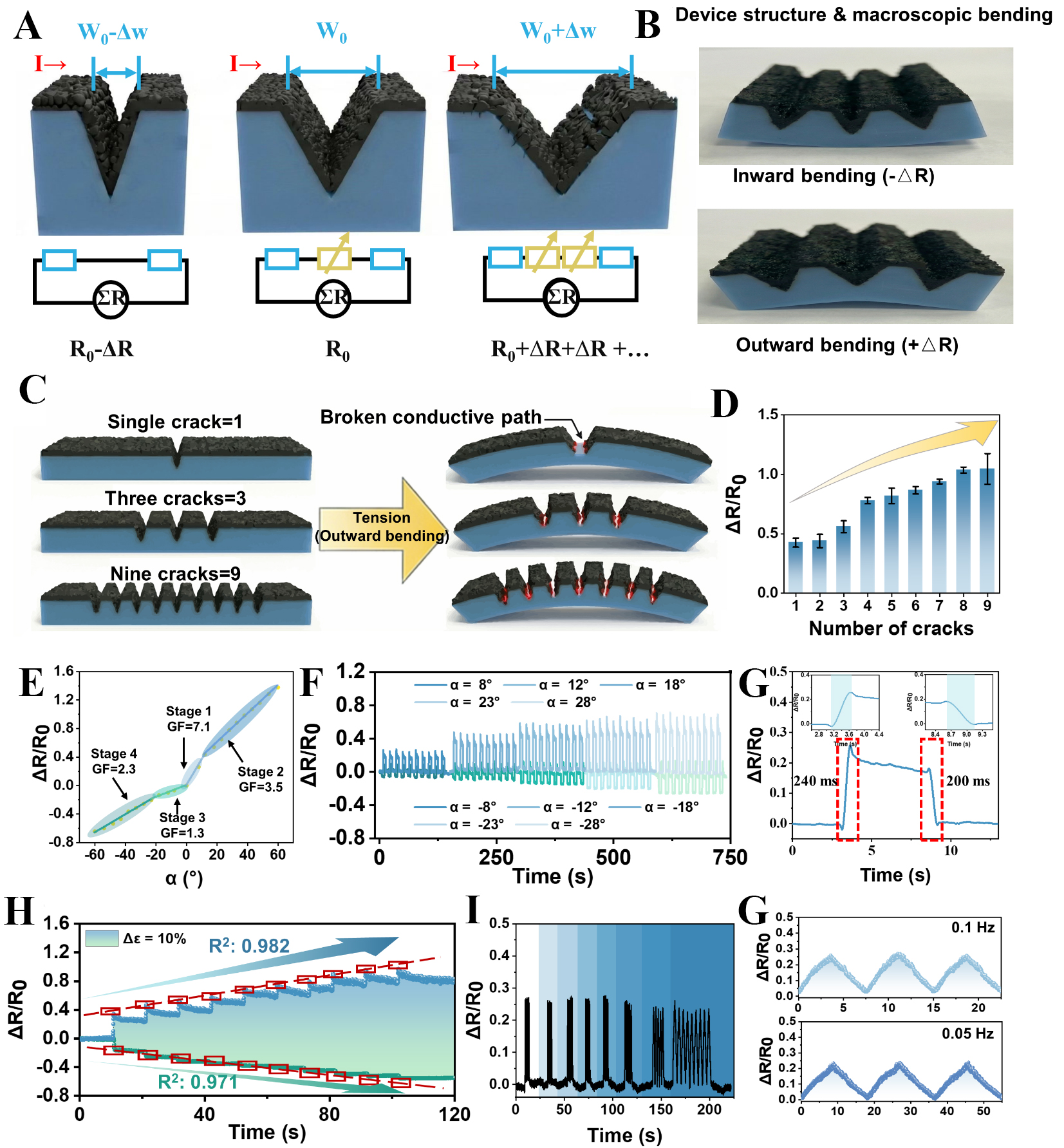
Figure 2. Working mechanism and electromechanical performance optimization of the bidirectional sensor. (A) Schematic and equivalent circuit model showing the fundamental resistance-variation mechanism. Inward bending increases the sidewall contact width, decreasing resistance, while outward bending separates the crack surfaces, increasing resistance; (B) Schematic showing the device undergoing inward (negative signal) and outward (positive signal) bending deformations; (C) Schematic of the structural optimization strategy achieved by increasing the number of parallel microslits from one to nine to enhance signal magnitude; (D) Quantitative analysis results of the relative resistance change as a function of slit number; (E) Characteristic bending central angle (α)-resistance curve identifying four distinct linear regions with corresponding GFs, demonstrating stable bidirectional sensitivity. The values are presented as mean ± SD; N = 5; (F) Real-time electrical response under cyclic stretching and releasing at varying α amplitudes (8° to 28°); (G) Transient response showing rapid rise (240 ms) and recovery (200 ms) times during an outward bending cycle; (H) Step-hold strain testing demonstrating the signal stability and low mechanical hysteresis during stepwise loading and unloading phases; (I) Dynamic resistance response obtained under variable deformation frequencies and amplitudes; (J) Signal consistency verification obtained at different actuation frequencies (0.1 and 0.05 Hz). GF: Gauge factor; SD: stand deviation.





