


fig2
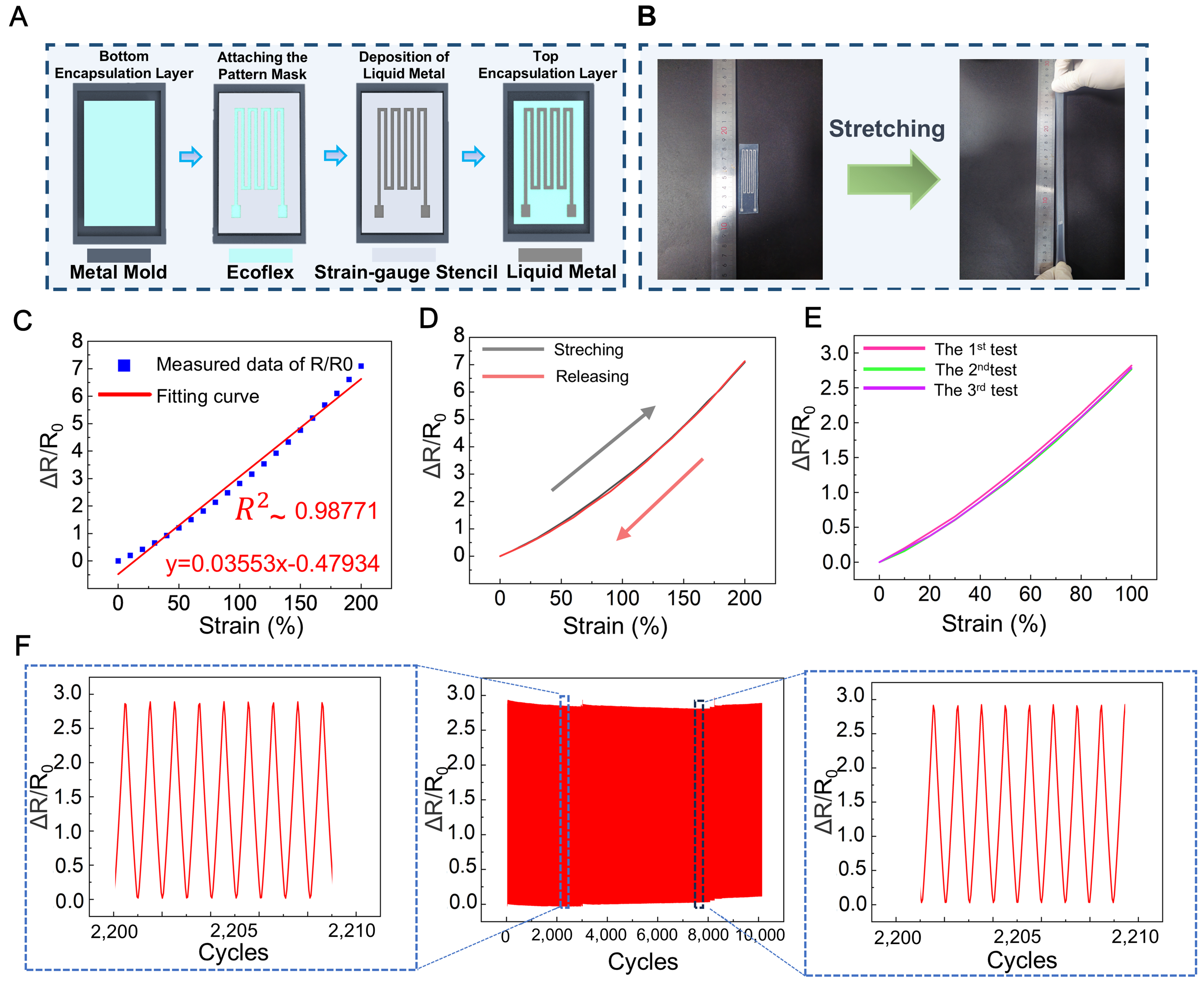
Figure 2. Fabrication and characterization of the flexible strain sensor. (A) Fabrication process of the flexible strain sensor; (B) Tensile stretching demonstration of the sensor; (C) Relative resistance change during 0%-200% sensor stretching; (D) Hysteresis of the strain sensor; (E) Repeatability of the strain sensor under 100% tensile strain; (F) Cyclic tensile test for 10,000 cycles at 100% strain.





