



fig3
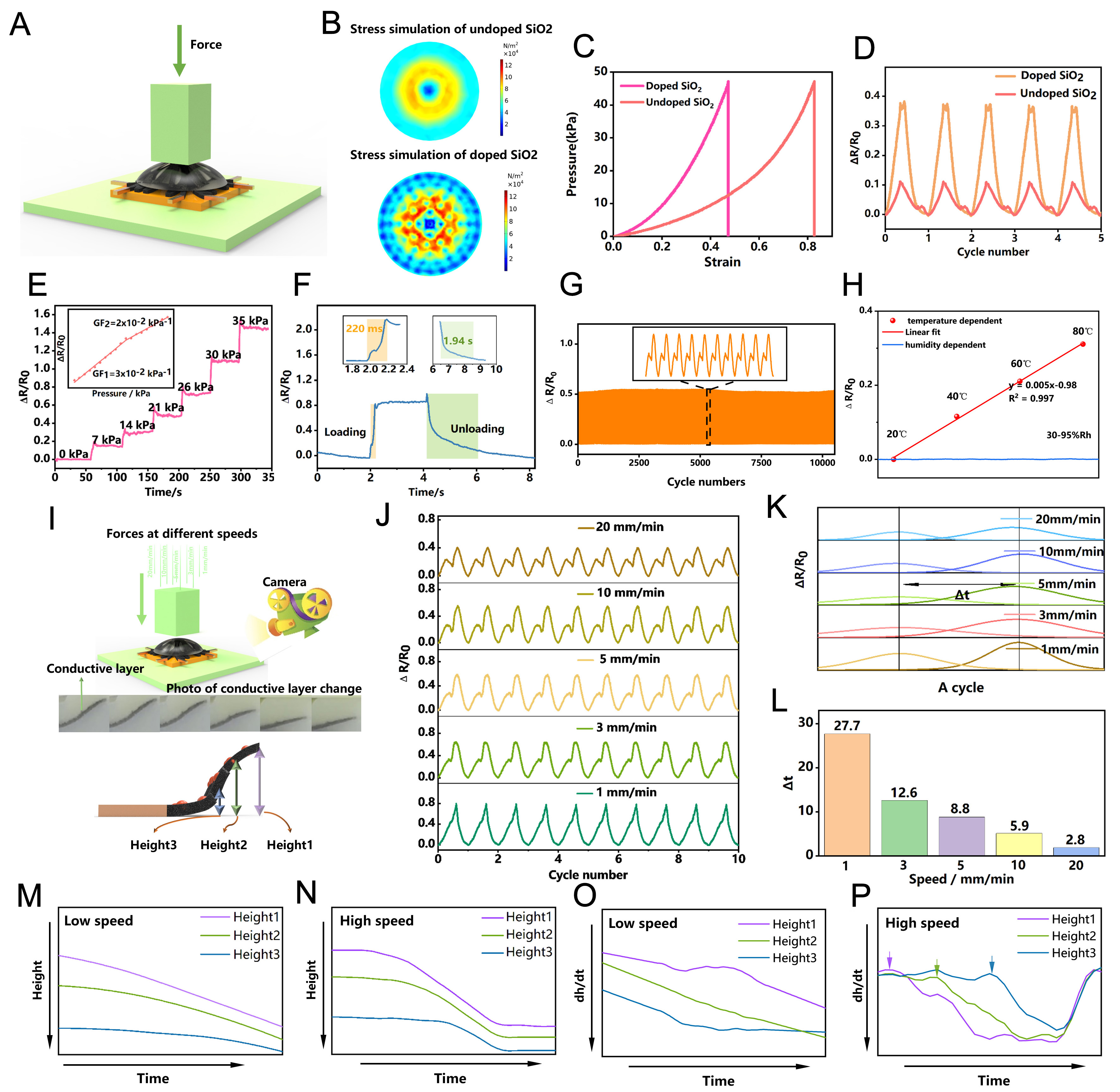
Figure 3. Fundamental performance characterization of the skin-inspired pressure sensor. (A) Schematic of the basic pressure-sensing test; (B) COMSOL-simulated stress distributions of undoped and SiO2-doped structures, highlighting the effect of doping on stress dispersion; (C) COMSOL-simulated pressure-strain characteristics of the sensors; (D) Comparison of cyclic resistance responses for doped SiO2; (E) Stepwise pressure response and sensitivity in different pressure regions; (F) Dynamic loading and unloading behavior, including response and recovery; (G) Cyclic durability under repeated loading; (H) Environmental stability characterization of the LIG-based tactile sensor; (I) Experimental setup at varying loading speeds with deformation images of the conductive layer and analysis of vertical stress transmission at three height positions (Height1-Height3); (J) Cyclic resistance responses at different speeds; (K and L) Peak separation in resistance curves, defined as Δt; (M and N) Time-resolved height variations under low-speed (m) and high-speed (n) loading; (O and P) First derivatives of height curves to analyze deformation propagation at different speeds. LIG: Laser-induced graphene.





