



fig2
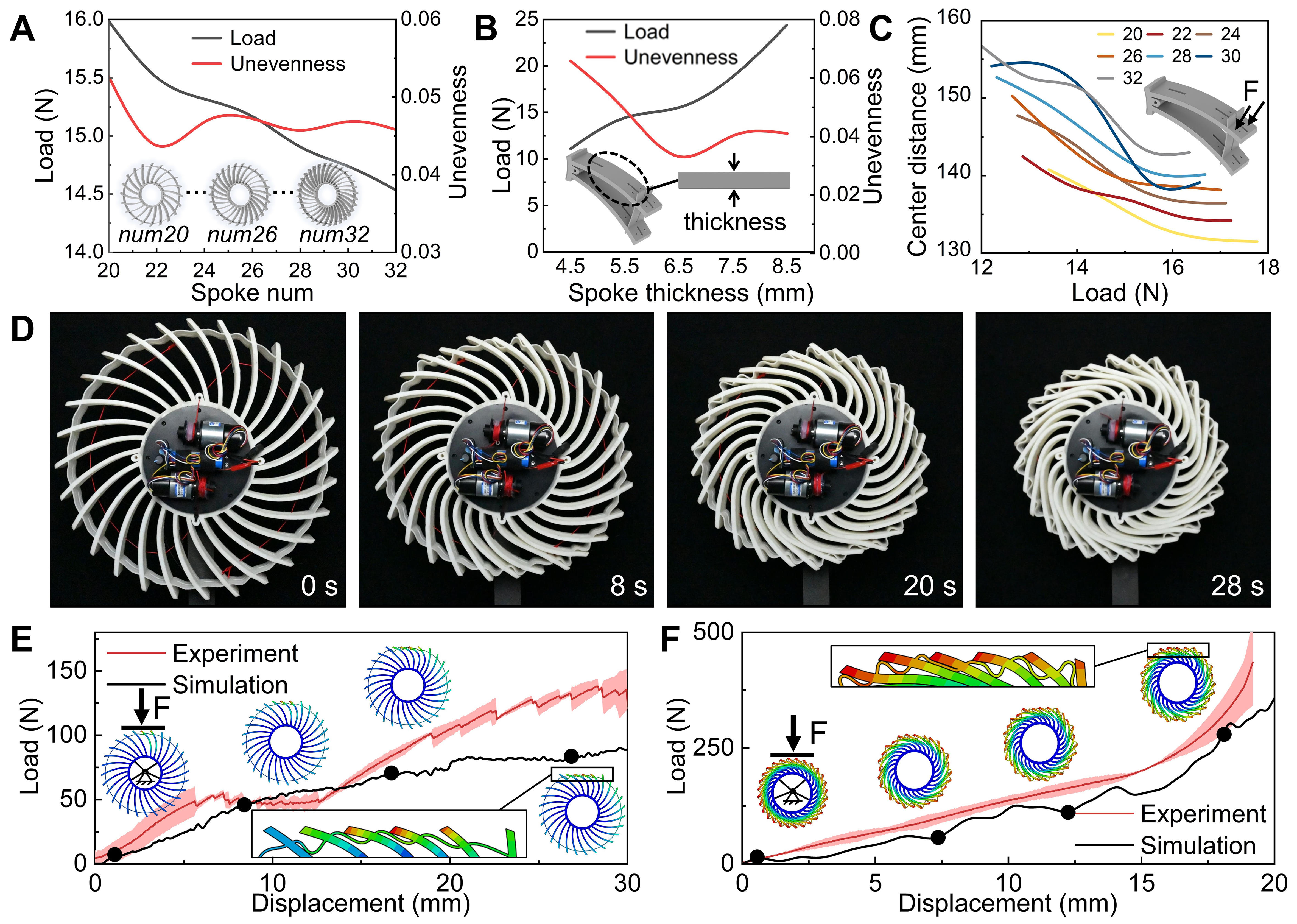
Figure 2. Structural design and mechanical testing of the spiral wheel. (A) Influence of the number of spokes on the contraction force and postcontraction outer-ring unevenness; (B) Influence of spoke thickness on the contraction force and outer-ring unevenness; (C) Contraction degree vs. applied force for wheels with different numbers of spokes, quantified by the average distance between the farthest and nearest points on the outer ring; (D) Contraction test under actuation by the external drive mechanism (photographed by the authors); (E) Comparison of experimental and simulated radial compression results for the expanded configuration; (F) Comparison of the experimental and simulated radial compression results for the contracted configuration.





