


fig4
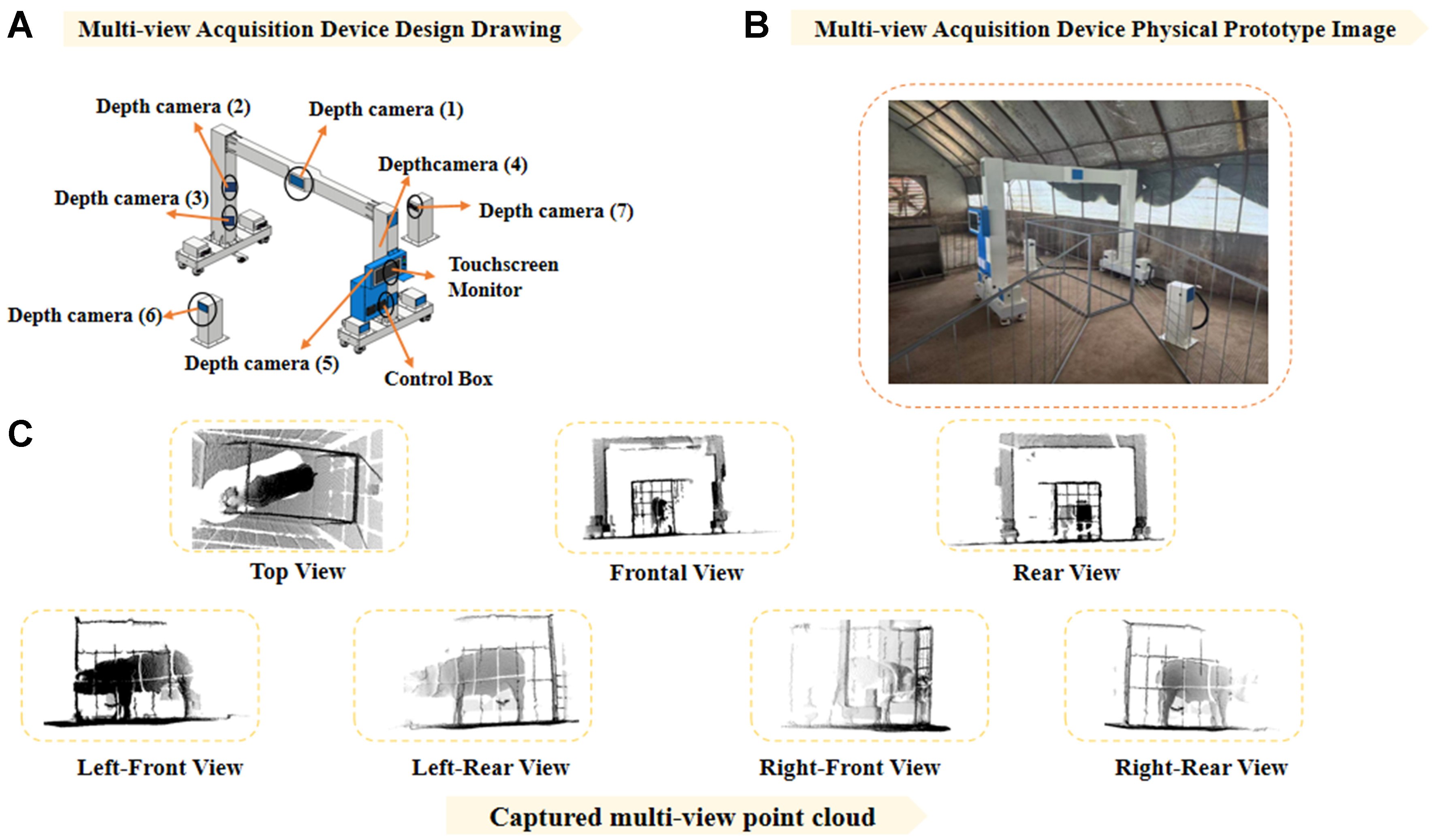
Figure 4. Multi-view 3D acquisition system: (A) Schematic diagram of the system architecture, consisting of seven depth cameras; (B) Deployment scenario of the system in a real-world livestock pen environment; (C) Point cloud images captured by the system from various perspectives: Top View, Frontal View, Rear View, Left-Front View, Left-Rear View, Right-Front View, and Right-Rear View. Figure 4 was collected by the authors. 3D: Three-dimensional.





