


Figure3
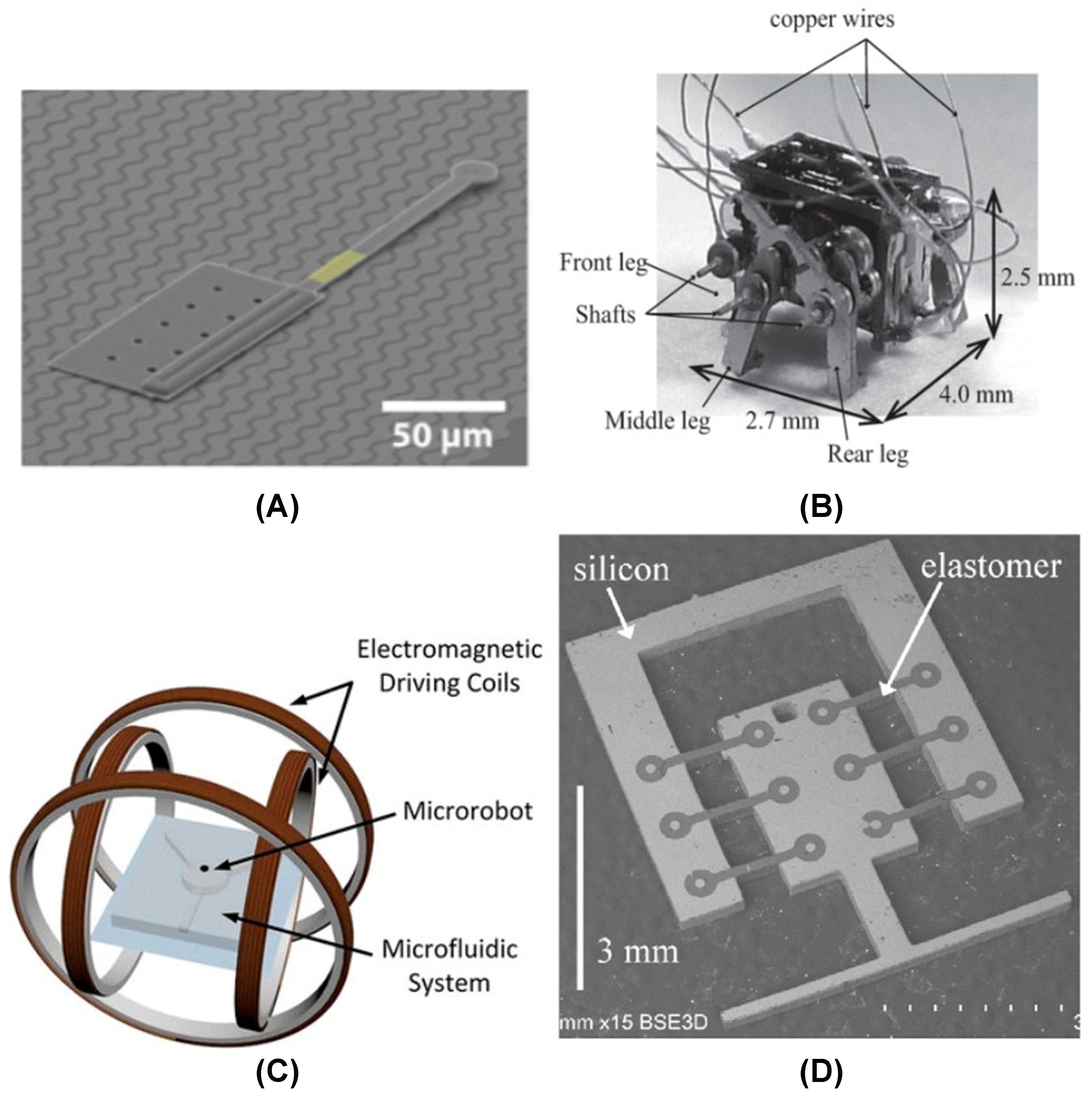
Figure 3. Examples of the MEMS-based actuation. (A) Image and scale of a microrobot that utilizes a SDA[45]; (B) Design of remote electromagnetic actuation system[46]; (C) Design and scale of microrobot utilizing an electromagnetic motor to power a leg mechanism[47]; (D) Image of elastomer jumping mechanism[48]. MEMS: Micro-electromechanical system; SDA: scratch-drive actuator.





