



fig8
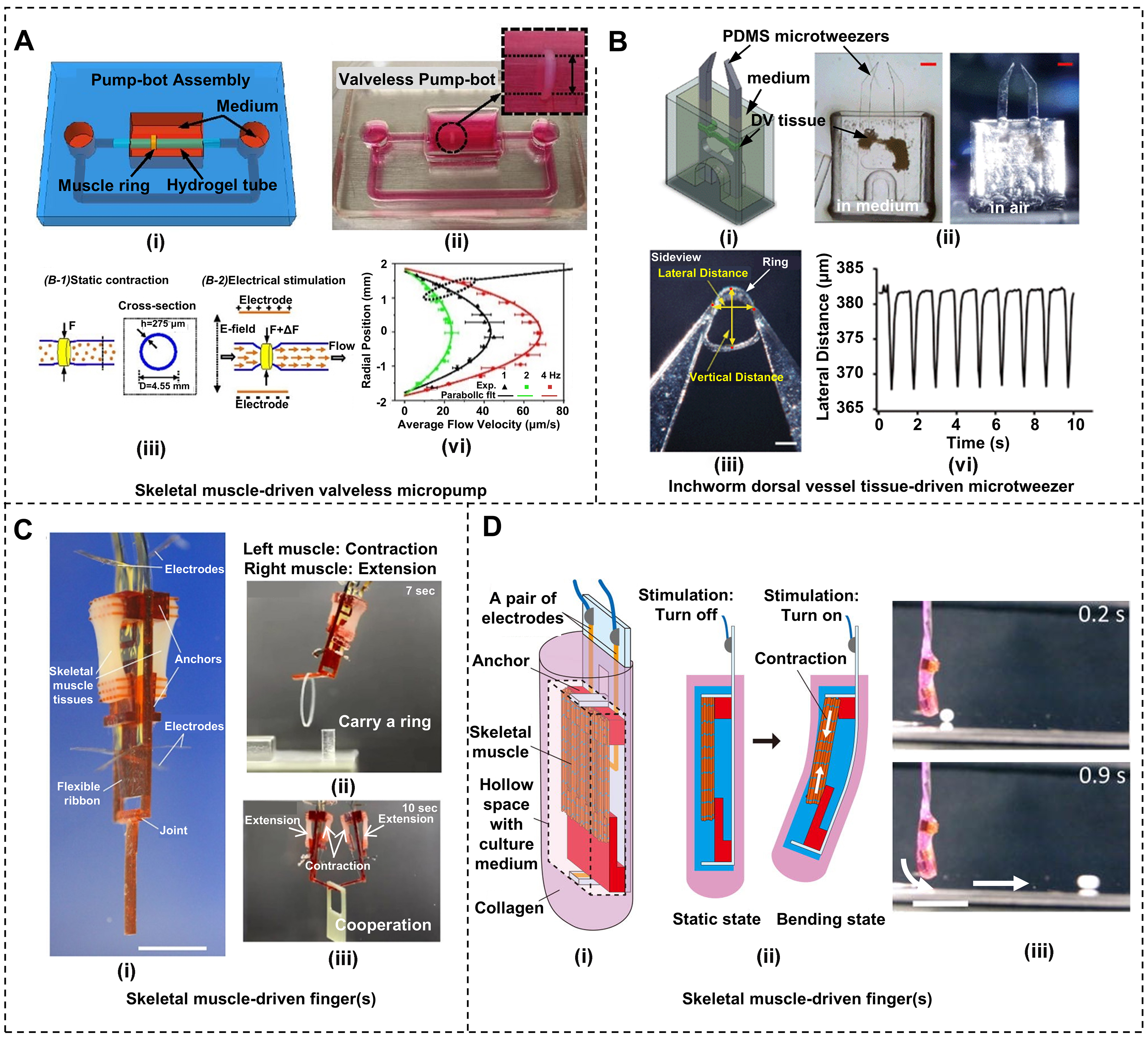
Figure 8. Strip-contraction-based non-locomotion bio-bots. (A) A skeletal muscle-driven valveless micropump. (i) Schematic of the assembled micropump by inserting the hydrogel tube into the round PDMS channels with a muscle ring wrapping around the tube at an off-center location; (ii) Photograph of the micropump; (iii) Schematic illustration of tube deformation under electrical stimulations; (iv) Flow patterns along the diameter of the tube at midsection under electrical stimulation of various frequencies. Reproduced with permission[88]. Copyright 2019, National Academy of Sciences; (B) A insect dorsal vessel tissue-driven microtweezer. (i) Schematic of the assembled microtweezer; (ii) Photographs of the microtweezer operated in medium (left) and in air (right) from the side; (iii) The microtweezer holding a tiny ring; (iv) Lateral displacement of the ring. Reproduced with permission[94]. Copyright 2013, RSC; (C) Skeletal muscle-driven fingers for pick-and-place manipulation of objects. (i) Photograph of the skeletal muscle-driven finger with the antagonistic pair of skeletal muscle tissues; (ii) The finger can carry a ring by selective contractions of the skeletal muscle tissues generated with electrical pulses; (iii) Two fingers can carry a square frame together. Reproduced with permission[96]. Copyright 2018, American Association for the Advancement of Science; (D) A skeletal muscle-driven finger encapsulated with collagen. (i) Schematic of the assembled skeletal muscle-driven finger; (ii) Operating principle of the skeletal muscle-driven finger; (iii) The finger can bounce the tiny ball. Reproduced with permission[97]. Copyright 2020, AIP Publishing.





